NGM的FMU在MATLAB Simulink中导入使用:实现跨平台联合仿真的无缝集成
随着多学科系统设计复杂度的提升,跨工具联合仿真成为工程领域的重要需求。NGM平台基于Modelica语言和FMI2.0标准,生成的FMU文件可直接导入MATLAB Simulink中,实现多领域模型的协同仿真,大幅提升开发效率。以下详细介绍操作流程、应用场景。
NGM FMU + Simulink有哪些优势?
- 兼容FMI 2.0标准:NGM生成的FMU文件严格遵循国际通用的FMI接口规范,确保与Simulink的无缝兼容。
- 多领域协同:通过FMU将机械、电气、控制等跨学科模型(NGM端)与Simulink的算法设计、控制系统验证(Simulink端)结合,形成完整系统闭环。
- 高效迭代:无需重复建模,直接复用NGM高精度模型,加速从概念设计到验证的流程。
操作流程:从NGM导出FMU到Simulink仿真
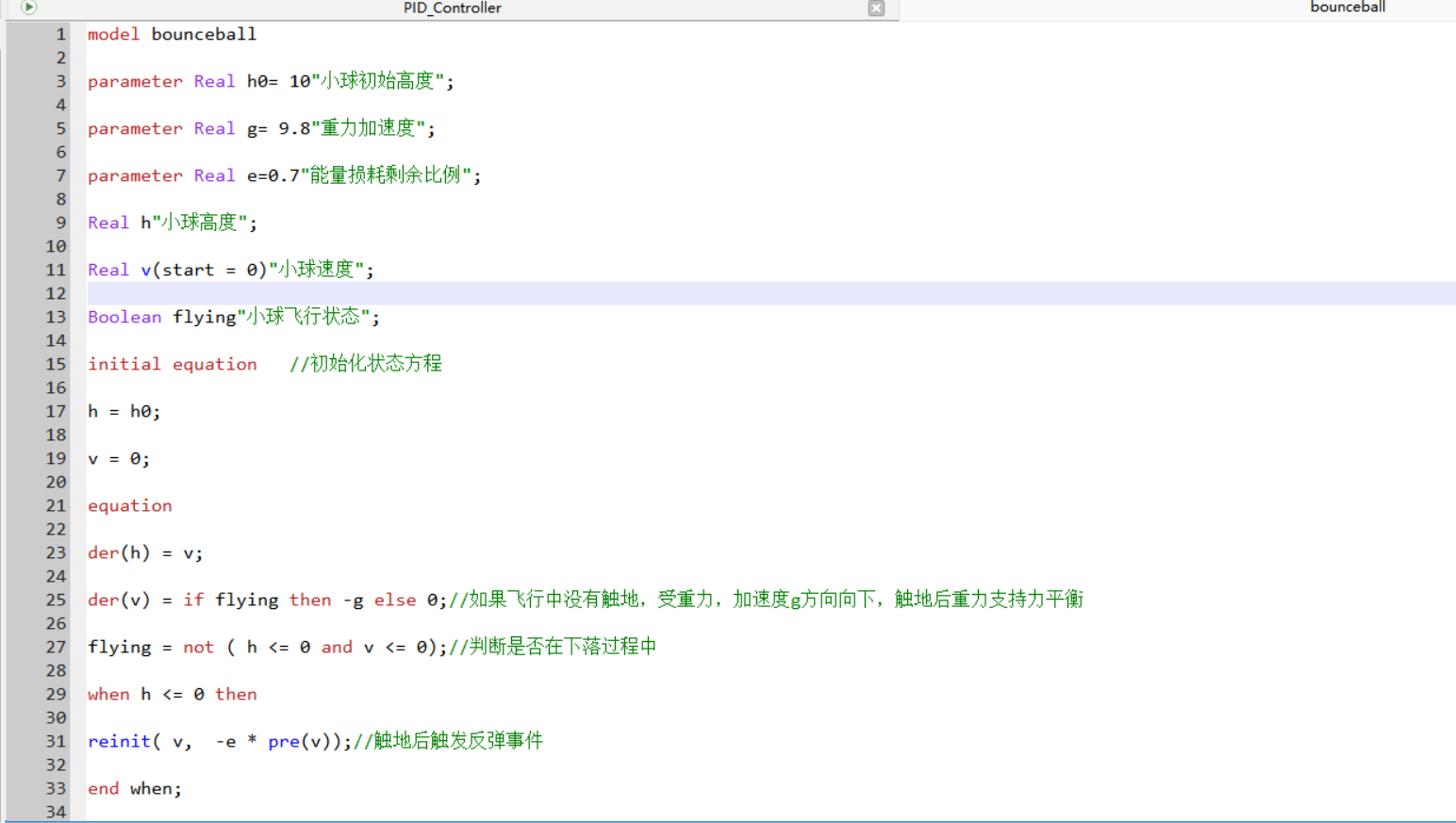
步骤1:在NGM中导出FMU文件(弹跳小球为例)
模型准备:
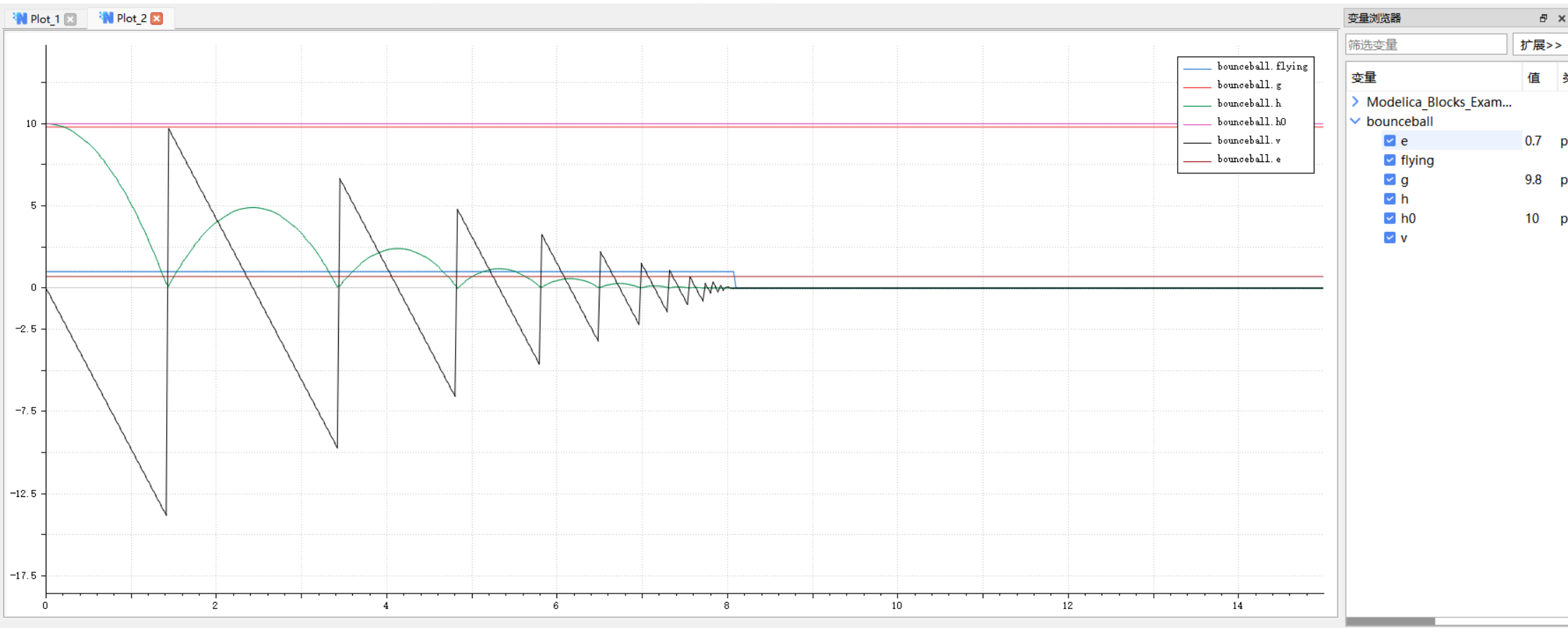
- 在NGM中完成Modelica模型的构建、编译与本地仿真验证。
FMU生成:
- 库浏览器右键点击模型,选择“导出为FMU”。
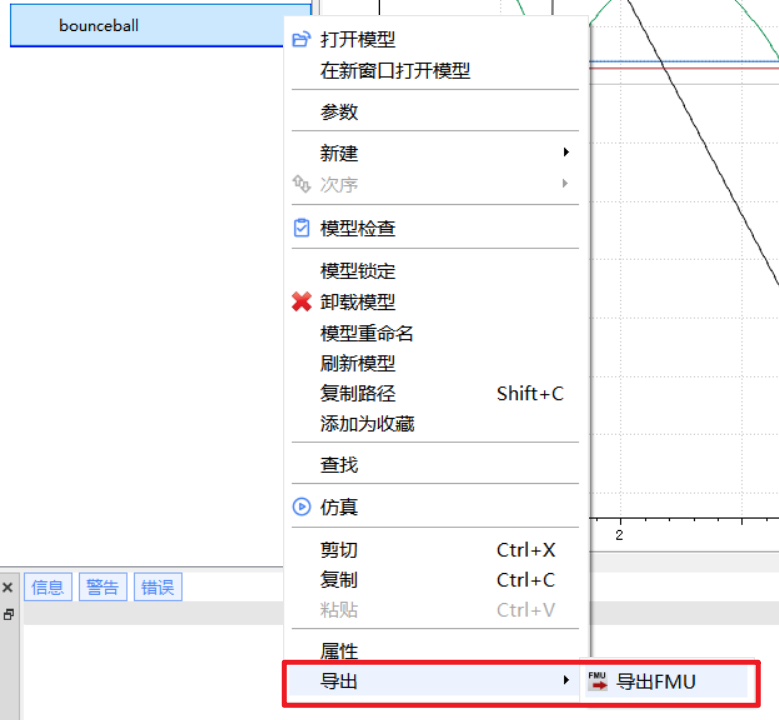
- 设置FMI版本为2.0,选择“Co-Simulation”模式。
- 指定输出路径,生成
.fmu文件。

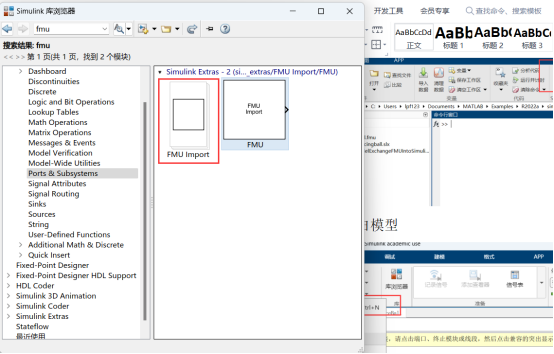
步骤2:在Simulink中导入FMU
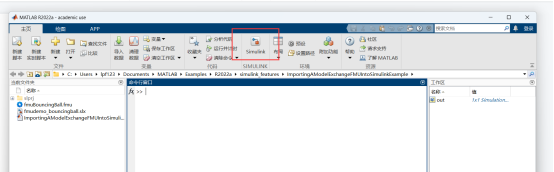
打开Simulink:新建或打开现有Simulink工程。
添加FMU模块:
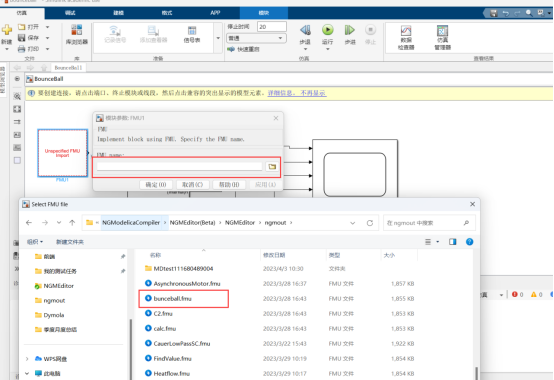
加载FMU文件:
- 点击“文件按钮”,选择从NGM导出的
.fmu文件。
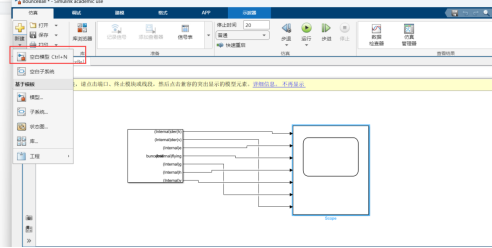
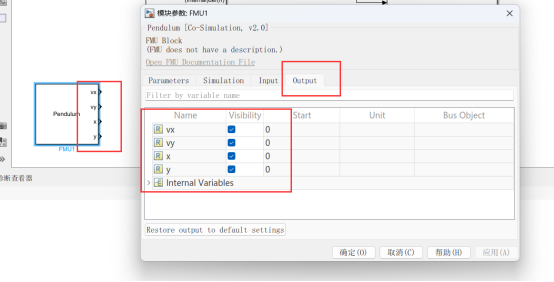
- 自动解析模型输入/输出接口,确认变量映射关系。
参数配置:
- 设置仿真步长、求解器类型(建议与NGM端保持一致)。
- 绑定Simulink信号线与FMU输入/输出端口。
步骤3:外接scope示波器,设置仿真时间可查看仿真曲线(波形)
- 运行仿真:启动Simulink仿真,FMU模块将自动调用NGM模型的计算内核。

典型应用场景
- 机电系统联合仿真
- 案例:在NGM中建立电机-传动机构模型,导出为FMU;在Simulink中设计PID控制器,验证动态响应。
- 控制算法快速验证
- 案例:将Simulink中的先进控制算法(如模型预测控制)与NGM的高保真被控对象模型结合,避免实物原型成本。
- 多学科优化迭代
- 案例:在NGM中参数化热力学系统,通过Simulink的优化工具箱(如Simulink Design Optimization)自动调参,实现能效最优。
核心优势
- 不同工具链无缝衔接
- 打破NGM(物理系统建模)与Simulink(控制逻辑设计)或其他仿真软件的壁垒,形成“建模-控制-验证”一体化流程。
- 高度模型复用
- 直接利用NGM的复杂多领域模型,避免Simulink中重新搭建简化模型的误差风险。
- 跨团队协作
- 机械、控制工程师可独立工作在NGM和Simulink中,最终通过FMU集成验证,提升并行开发效率。
注意事项
- 版本兼容性:确保MATLAB/Simulink版本支持FMI 2.0(推荐R2019b及以上)。
- 接口一致性:检查FMU输入/输出变量命名与Simulink信号线是否匹配。
NGM与MATLAB Simulink的联合仿真能力,为复杂系统(如新能源汽车、航空航天装备、智能机器人)的设计与验证提供了高效、灵活的解决方案。通过FMU接口,用户既能保留NGM多领域建模的精度优势,又能利用Simulink强大的控制算法生态,显著缩短开发周期,降低跨平台协作成本。
在NGM中导出您的第一个FMU,并拖入Simulink中,体验多工具协同的工作魅力吧!