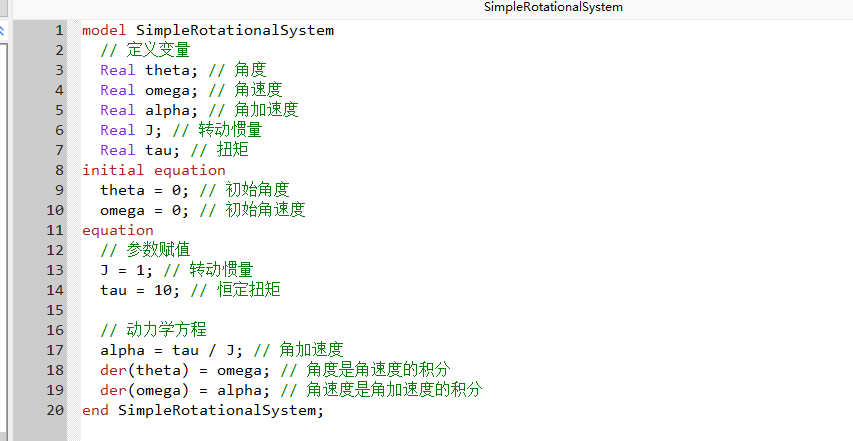
model SimpleRotationalSystem
// 定义变量
Real theta; // 角度
Real omega; // 角速度
Real alpha; // 角加速度
Real J; // 转动惯量
Real tau; // 扭矩
initial equation
theta = 0; // 初始角度
omega = 0; // 初始角速度
equation
// 参数赋值
J = 1; // 转动惯量
tau = 10; // 恒定扭矩
// 动力学方程
alpha = tau / J; // 角加速度
der(theta) = omega; // 角度是角速度的积分
der(omega) = alpha; // 角速度是角加速度的积分
end SimpleRotationalSystem;
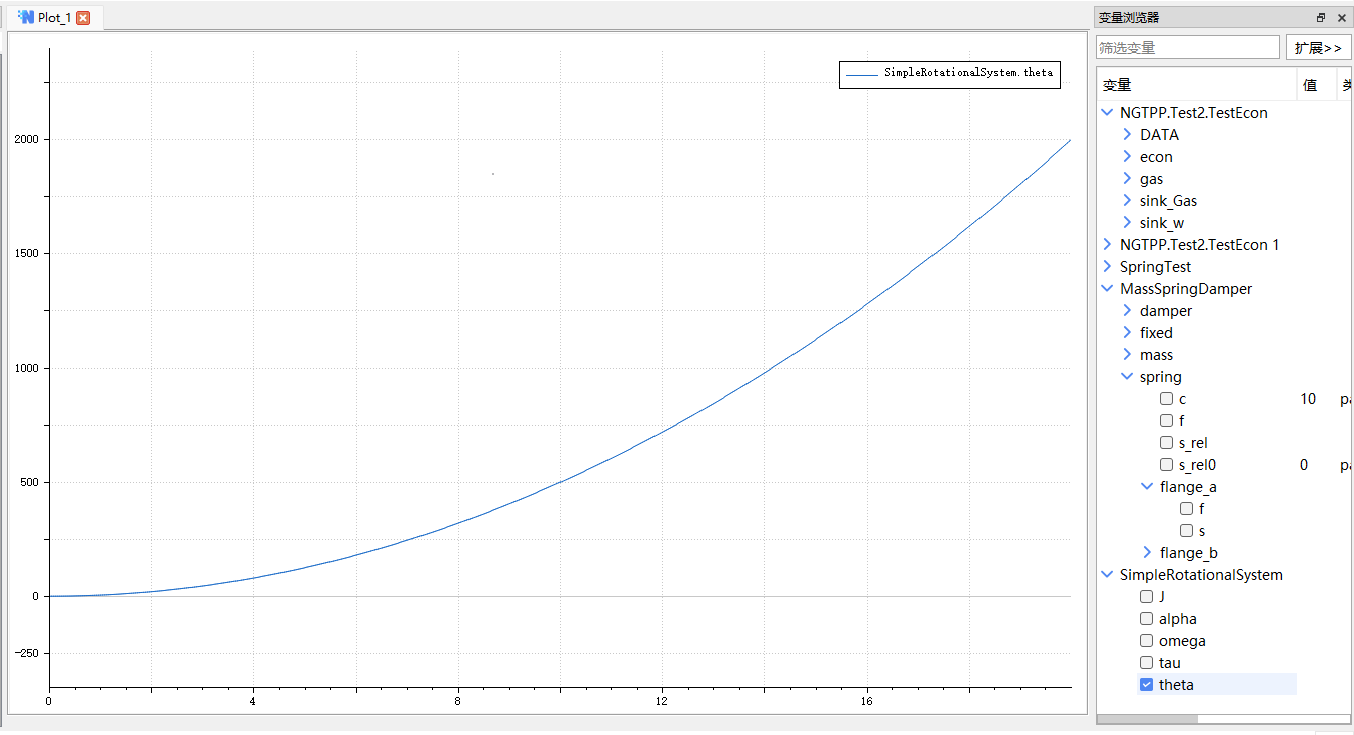
说明:
1.这是一个简单的机械旋转系统模型,描述了在恒定扭矩作用下的旋转运动。
2.使用 alpha = tau / J 计算角加速度。
3.通过 der(theta) = omega 和 der(omega) = alpha 描述角度和角速度的变化。